Sheath Design Flow
Competition System
September 2022- November 2022
Constraints:
To Allow for full movement of all 11 modules in all locomotion/geometries
To Prevent regolith/dust from entering the system
Doesn't cause the system to overheat or to seize
Challenges:
Materials research
Why A Single-Sheath?
Originally, our team was going to pursue either a single-sheath or a bellow-jointed sheath idea. Ultimately, we went with a single-sheath as the idea of having individual sheaths for each module had both increased complexity and chances of failure.
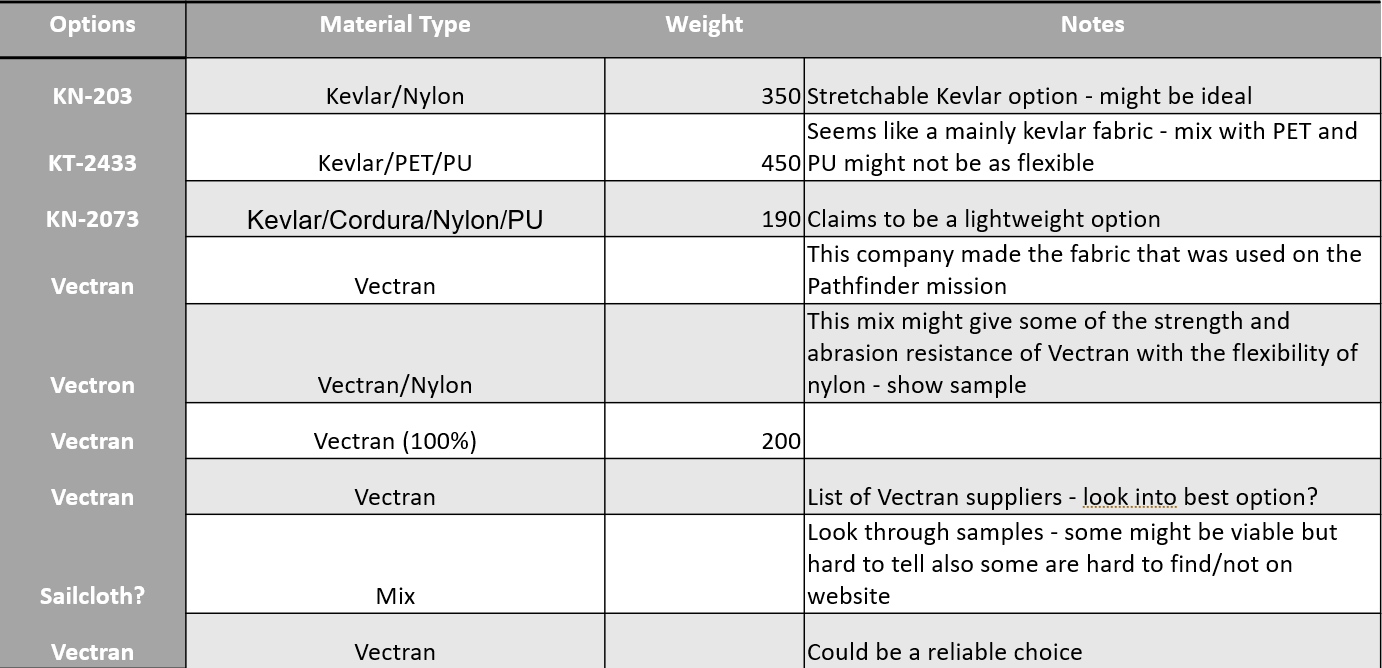
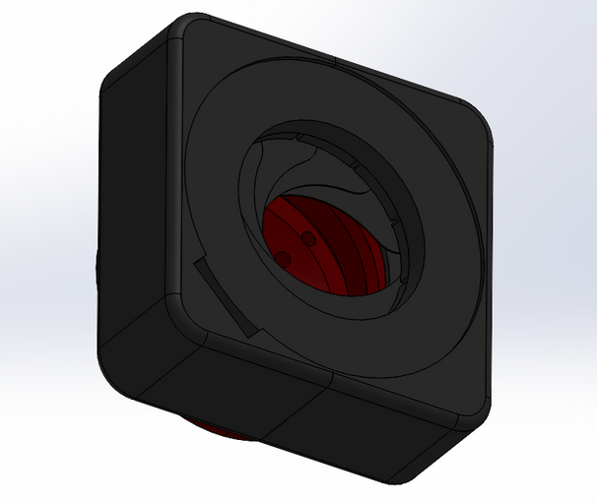
Primary Research:
Synthetic polymers such as neoprene and nylon were looked into as well as space-grade fabrics like Kevlar and Vectran. These were chosen due to their highly durable and abrasion-resistant properties and applications.
Due to supply chain issues, neoprene was the chosen fabric for our first iteration of COBRA.
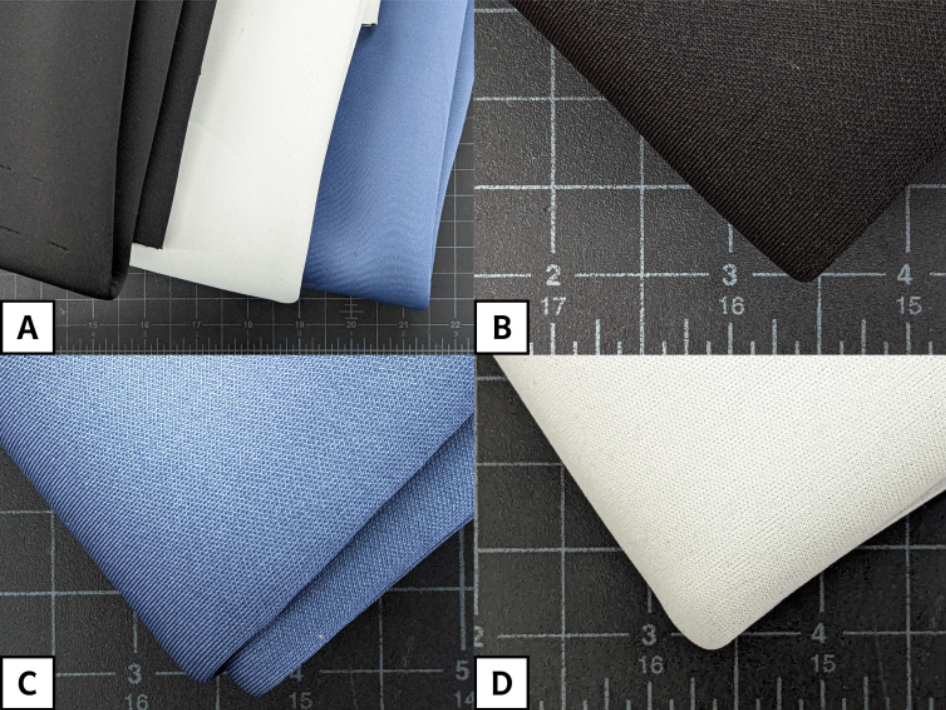
Final Materials:
A: All Neoprene Samples
B: 3 mm Neoprene
C: 2 mm Neoprene
D: Closed Cell Neoprene
E: 3 mm Neoprene Sheath on COBRA

Successes:
The system was able to engage in it's sidewinding and crawl locomotion as well as its spiral and hex geometries with minimal dust interference. This included a ~50 meter ~28 degree tumble down a rocky mountain.
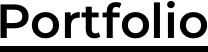
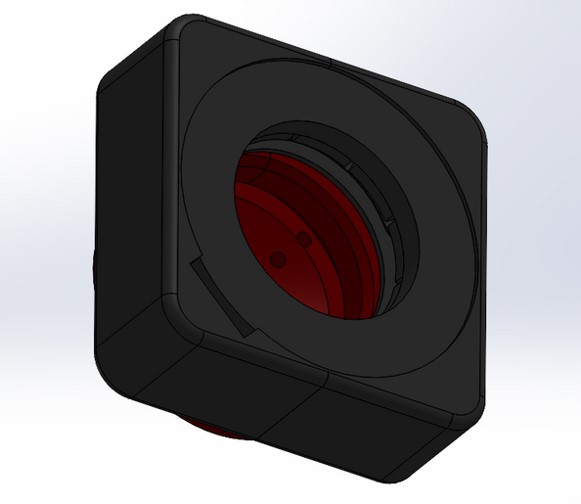
Needs Improvement / In Progress:
After the tumble mentioned above, parts of the system did poke small holes into the neoprene. We also had not ideated a way to integrate the sheath with the full system. The main idea was for attachments at the head and tail modules to cinch the ends of the sheath. For the tail module's attachment, I began designing SOLIDWORKS CAD of an Iris Door Mechanism as seen on the right.